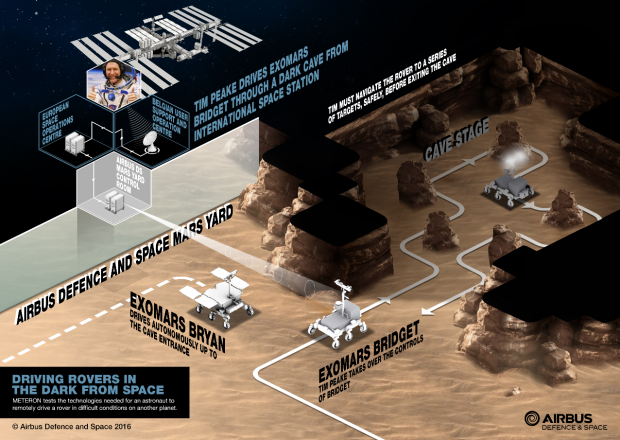
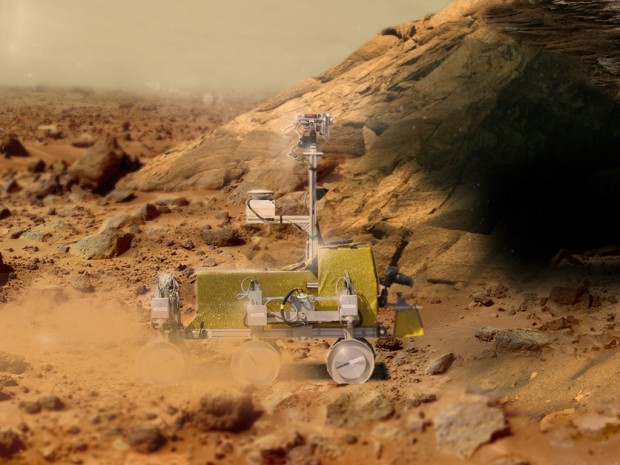
Sie geht los – die Probefahrt mit dem Mars-Rover Bridget. Allerdings befinden sich weder der Fahrer noch das ferngesteuerte Fahrzeug auf dem Roten Planeten. Von der Internationalen Raumstation ISS aus wird Astronaut Tim Peake es auf einem Testgelände in England herumkurven lassen – so der Plan.
Es ist nicht das erste Mal, dass der Astronaut mit ferngesteuerten Mars-Rovern spielt: Erst im März hatte Tim Peake den Roboter Eurobot in den Niederlanden getestet. Beide Testfahrten sind Teil des Meteron-Projekts der europäischen Raumfahrtbehörde Esa. Damit bereitet sich die Esa auf Missionen zum Mars oder sogar zu noch ferneren Zielen im All vor: Statt Astronauten sollen erst mal Roboter das neue gefährliche Terrain erkunden. Im besten Fall könnten Astronauten von einer Raumstation aus die Rover steuern. Bis der aktuelle Mars-Rover Curiosity gehorcht, dauert es momentan noch 26 Minuten. Mit so einer Verzögerung sei es schwierig, spontan auf eine neue Situation zu reagieren, schreibt Tim Peake in seinem Blog. Die Wissenschaftler des Meteron-Projekts arbeiten daran, dass die Roboter schneller reagieren – und das am besten sogar im Dunkeln.
Hier können Sie das Experiment ab 15.30 deutscher Zeit im Livestream verfolgen: airbusdefenceandspace.com
Genau das testet Peake jetzt mit dem Prototypen Bridget. Bei Tageslicht kommt dieser Mars-Rover alleine zurecht und kann sich eigenständig in der Marslandschaft – beziehungsweise auf seinem irdischen Test-Parcours – orientieren. Im Dunkeln wird es schwierig: Die Software des Rovers erkennt den Unterschied zwischen einem Schatten und einem Felsen nicht mehr. Außerdem wird der Roboter dann nicht mit Solarenergie versorgt – der Akku hält nur eine begrenzte Zeit. Um möglichst realistische Bedingungen zu schaffen, wird der Astronaut das Fahrzeug für den Versuch in eine künstlich angelegte Höhle lenken.
Was genau Peake mit dem Roboter dort erledigen soll, erfährt der Astronaut erst kurz vor dem Test. Genau so wäre es auch in einer echten Mission. Jetzt fragen wir uns: Hat er auf der ISS kein Internet? Oder darf er nicht ins Netz gucken? Jedenfalls steht die Aufgabe schon online: Peake soll den Rover in die Höhle fahren, dort drei Hinweise finden, die mit UV-Licht markiert wurden und sie mit der Kamera des Roboters aufnehmen. Anschließend muss er sie in eine Karte einzeichnen und die Bodenkontrolle informieren – dafür hat er insgesamt 90 Minuten Zeit, dann wird die Energie knapp.
Der Test findet auf einer Übungsfläche in England statt, die die Oberfläche des Mars, so gut es geht, nachstellt. Der Testbereich misst allerdings nur etwa 30 mal 13 Meter.
Auch Bridget hat eine etwas lange Leitung, was der Astronaut während des Hindernisrennens einkalkulieren muss. Außerdem erwarten die Forscher immer wieder Unterbrechungen des Signals. Damit herrschen ähnliche Bedingungen wie im Orbit des Mondes oder des Mars.
Ob Tim Peake seine Nachtfahrt besteht, kann jeder am Bildschirm verfolgen: Ab 15.30 Uhr wird der Versuch unter dem Link airbusdefenceandspace.com im Livestream übertragen. Ähnliche Rover sollen eines Tages den Mars erkunden und dort sogar die Ankunft von Astronauten vorbereiten. Solange wird mit ferngesteuerten Mars-Autos gespielt.
Einige Autoren dieses Blogs
Alles zum Thema Astronomie und Raumfahrt finden Sie hier.
Mehr Fundstücke aus dem Netz lesen Sie hier im Teilchen-Blog.